



- 您当前的位置是:首页 >人工智能产品 > 人工智能计算与数据平台
- 人工智能计算与数据平台
-

-
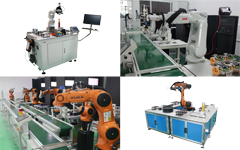
履带式复合器人eAI4600
产品型号:eAI4600
履带式复合机器人为复合型、自主导航协作机器人。
- 详细内容
-
履带式复合机器人为复合型、自主导航协作机器人,基于可适配的全能型机器人底盘或履带型机器人底盘,集成了6自由度机械臂、深度视觉传感器、高精度激光雷达、高性能工控、4G路由器等套件设备,可在城市道路、果园田野、矿场、斜坡、楼梯等室内外复杂环境下实现机器视觉、协同控制、机械管抓取、深度学习等功能应用,完成自主定位导航,路线规划和避障,协同控制和抓取作业等任务。此外,内置了开源ROS操作系统,为机器人商业应用和教育科研提供了一个强大的应用开发平台。
◆ 协作机械臂
负载:7KG
自由度:6
臂展:810mm
重复定位精度:±0.05mm
◆ 技术参数
外形尺寸:1064mm*845mm*473mm
悬挂系统:克里斯蒂悬挂+玛蒂尔达四轮平衡悬挂
续航能力:3h
运行速度:0~1.5m/s
工作环境温度:-20℃~60℃
充电时间:4.5h
电池类型:锂电池
控制模式:遥控控制/指令控制模式
转向形式:履带式差速转向
- 上一篇:人工智能计算与数据系统平台
