



-

-
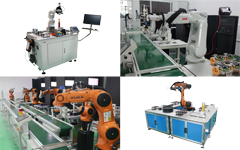
智慧物流开发系统eAI8400
产品型号:eAI8400
智慧物流开发系统eAI8400
- 详细内容
-
硬件参数
移动与搬运机器人
移动机器人主机
驱动方式:差分驱动
轮子数量:4个
主动轮直径:120mm
负载:50kg
最大速度:0.8m/s,最大导航速度 0.3m/s
续航时间:4-6小时
通信接口:BLE/USB-UART
工业编码器:600线2相
整体尺寸:直径405mm×高210mm
机器人自主定位导航系统
CPU:i5_4200U(1.6GHz)
内存硬盘:4GB RAM,64GB固态硬盘
软件系统:Ubuntu16.04+ROS Kinetic
操作系统:基于ROS机器人操作系统,支持Web API;可扩展丰富的SDK资源,利于二次开发
手动建图:通过用户手动控制探索需要工作的区域并建立地图
自动建图:可以无需人为干扰的情况下,自动探索室内环境,并构建室内地图
导航避障:融合激光雷达等传感器实现空间环境避障,实时更新地图
激光雷达:具备基于激光雷达的SLAM算法,可实现建立地图,自主导航,自主避障等功能
遥控:可实现Andiord手机APP控制,实现多目标点之间自主巡航
导航扫描单元
扫描测距:360度全方位扫描测距
测距精度:测距误差小,精度高达1%
测距范围:不低于10m
测距频率:5Hz~12Hz
角度分辨率:0.61~0.65
高速测距:测距频率可达4000Hz
视觉扫描单元
深度范围:0.6-8米
精度:±1-3mm(1m范围内)
深度FOV:H 58.4°V 45.5°
彩色FOV:H 66.1°V 40.2°
支持操作系统:ROS/Android/Linux/Windows/7/8/10
四轴机器人
最大负载:0.5kg
工作范围:320mm
轴数:4轴
重复定位精度:±0.2mm
轴运动范围:
A1: ±90°,320°/s;
A2:0°to +85°,320°/s;
A3:-10°to +95°,320°/s;
A4:±90°,480°/s。
重量:4kg
环境温度:-10℃~60℃
通讯接口:支持UBS/WiFi/Bluetooth
功率:60W Max
控制器:集成控制器
扩展I/O接口:支持可配置为模拟信号输入或PWM输出,可控12V电源输出,通讯接口,步进电机驱动等接口
协作机器人
机器人本体
单臂臂展:954mm
单臂负载:5kg
单臂自由度:6个
轴运动范围/速度
A1:±360° 180°/s
A2:-85°,+265° 180°/s
A3:±175° 180°/s
A4:-85°,+265° 180°/s
A5:±360° 180°/s
A6:±360° 180°/s
工具端典型速度:3m/s
重复精度:±0.05mm
机器人本体重量:23kg(不含底座)
示教器:PC或移动终端
编程方式:示教编程、拖动示教
总线协议:TCP/IP、Modbus TCP、Modbus RTU、Profinet、EtherNet/IP
软件接口:支持C/C++、C井、Python开发,支持ROS系统
I/O数量:16路输入及输出
电源:AC220V,50-60Hz
视觉智能检测系统
1、视觉智能检测系统,主要是配合工业机器人实现智能检测工件角度缺陷及自动对位等,以及工业机器人视觉学习开发使用;
2. 工业相机
2.1 像素:130W像素;
2.2 分辨率:1280×960;
2.3 像素尺寸:3.75μm× 3.75μm;
2.4 光谱:彩色;
2.5 工业镜头,f=16mm , C-Mount 接口;
2.6 配套光源及光源控制器;
2.7 提供NI Vision 或OpenCV编写的案例程序,包括模板匹配、零件识别、字符识别、条码识别、二维码识别等。
PLC系统
1、工业领域应用主流品牌;
2、输入输出:总点数16(可扩展);
3、支持结构化程序和多个程序运行、ST 语言、FB 功能块;
4、内置高速脉冲输入4路;
5、内置模拟量输入2路;
6、支持多种通讯协议,可实现与触摸屏、工业机器人、机器视觉以及多台PLC 间的通讯。
触摸屏
1、支持与PLC通讯,可组态;
2、7寸及以上TFT真彩工控液晶显示屏+触摸屏;
3、分辨率 800×480,16M色;
4、内置通讯接口类型满足教学需求(PLC通信接口、网口、卡槽、USB口等);
5、配套编程控制软件。
自动拧螺丝装配系统组件
1、自动拧螺丝装配系统实现了在自动装配过程中进行螺丝拧紧的功能,能够自动完成吸取螺丝,拧紧螺丝的完整过程;
2、包含知名品牌自动螺丝排序机、进口品牌气动拧螺丝机等;
3、适应螺丝范围:M2-M4之间;
4、视觉识别精度为:±1mm;
5、包含螺丝排序机;
6、交流电源:AC110-240V;
7、螺丝长度范围:2-20mm;
8、机器人工具盘上自带自动电批;
9、扭力范围:2.0kgf.cm±0.3%;
10、空载转速:1000r.p.m±10%;
11、力矩重复精度:±0.3%。
自动分拣插件组件
1、该单元包含了原始物料区和分拣插件成品区;
2、工业视觉自动判断物块类型,工业机器人响应分类过程,模拟了工业场合3C等电子行业的产品的分拣,插件过程;
4、具有1个分拣插件工装盘,对应插装分拣物料;
5、物料为铝合金或工程塑料,大小为:φ23~37mm之间;
6、捕获识别物料范围为:100×100mm之间;
7、精度:±0.5mm;
8、配合视觉识别精度:99.8%;
9、分拣吸嘴安装在机器人末端;
10、配备圆形、三角形、正方形、六边形料块红色和黄色各1套,并且设置了1套黄色缺陷物料。
快换装置
1、1拖3快换模块,支持多种末端工具;
2、每个快换装置均具有气路和电路接口,支持各种执行端应用;
3、末端负载:1kg。
智能装配组件
1、工件定位工装盘一套;
2、气动夹具一套;
3、装配工件5套。
自动夹爪
1、气动驱动;
2、工业环境设计,高可靠性;
3、夹爪适应工件宽度:20~60mm;
4、抓取最大负载:1.5kg。
