



- 您当前的位置是:首页 >人工智能产品 > 人工智能开发与应用平台
- 人工智能开发与应用平台
-

-
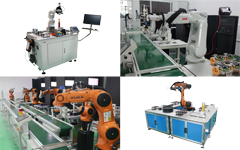
协作机器人开发与应用平台Rbt4120
产品型号:Rbt4120
协作机器人开发与应用平台是以协作机器人系统、计算机系统、视觉系统、PLC系统等为核心,包含机器人模拟焊接、打磨、码垛、装配、搬运、写字绘画等应用功能,以及智能仓储系统、自动传送系统、快换工具、传感技术、机器视觉技术等功能单元及技术,是学习智能机器人编程与应用、人工智能技术、机器视觉技术、PLC控制技术、传感技术等多种技术的多功能实训平台。
- 详细内容
-
产品介绍
协作机器人开发与应用平台是以协作机器人系统、计算机系统、视觉系统、PLC系统等为核心,包含机器人模拟焊接、打磨、码垛、装配、搬运、写字绘画等应用功能,以及智能仓储系统、自动传送系统、快换工具、传感技术、机器视觉技术等功能单元及技术,是学习智能机器人编程与应用、人工智能技术、机器视觉技术、PLC控制技术、传感技术等多种技术的多功能实训平台。
主要单元
协作机器人本体
机器人控制器
视觉智能检测系统
PLC系统
触摸屏
工业控制计算机
3D曲面TCP练习组件
写字绘图组件
工具快换组件
井式自动下料组件
装夹定位组件
分拣皮带输送线组件
分拣存储组件
旋转料仓组件
硬件参数
协作机器人本体
1、自由度:6自由度;
2、负载:5kg;
3、臂展:954mm;
4、轴运动范围
A1:±360° 180°/s
A2:-85°,+265° 180°/s
A3:±175° 180°/s
A4:-85°,+265° 180°/s
A5:±360° 180°/s
A6:±360° 180°/s
5、重复精度:±0.05mm;
6、编程方式:图形化编程、拖拽编程;
7、示教器类型:PC、移动终端(PAD/手机);
8、工具端典型速度:3m/s;
9、功耗:350W;
10、温度范围:0-50℃ ;
11、IP等级:IP54;
12、机器人安装:任意角度安装;
13、工具I/O端口:数字输入2,数字输出2,模拟输入1;
14、工具I/O电源:24VDC;
15、材质:铝合金、PC塑料;
16、重量:23kg。
机器人控制器
1、IP等级:IP44;
2、I/O端口:16个数字输入及输出,2个模拟输入或输出;
3、I/O电源:24V;
4、通信标配:TCP/IP, Modbus TCP, Modbus RTU,Profinet,Ethernet/IP;
5、电源:100-240VAC,50-60Hz;
6、材质:不锈钢合金。
机器人工作平台
1、整个平台采用立式结构,钣金框架,铝型材铺面。
2、材料:铝合金+碳钢板。
3、平台上安装机器人及功能单元,工作平台为可以灵活安装各功能模块的导槽式结构。平台下集成电气安装空间,可以放置机器人控制柜、工控机、电源、PLC、以及其它电路气路元件。
4、电气接线部分为抽屉式结构,便于接线,预留扩展区域,便于设备的扩展。
5、尺寸:1600mm×1200mm×800mm。
6、平台面板为多用途可扩展设计方式,扩展非常灵活。
视觉智能检测系统
1、视觉智能检测系统,主要是配合工业机器人实现智能检测工件角度缺陷及自动对位等,以及工业机器人视觉学习开发使用;
2. 工业相机
2.1 像素:130W像素;
2.2 分辨率:1280×960;
2.3 像素尺寸:3.75μm× 3.75μm;
2.4 光谱:彩色;
2.5 工业镜头,f=16mm , C-Mount 接口;
2.6 配套光源及光源控制器;
2.7 提供NI Vision 或OpenCV编写的案例程序,包括模板匹配、零件识别、字符识别、条码识别、二维码识别等。
PLC系统
1、工业领域应用主流品牌;
2、输入输出:总点数16(可扩展);
3、支持结构化程序和多个程序运行、ST 语言、FB 功能块;
4、内置高速脉冲输入4路;
5、内置模拟量输入2路;
6、支持多种通讯协议,可实现与触摸屏、工业机器人、机器视觉以及多台PLC 间的通讯。
触摸屏
1、支持与PLC通讯,可组态;
2、7寸及以上TFT真彩工控液晶显示屏+触摸屏;
3、分辨率 800×480,16M色;
4、内置通讯接口类型满足教学需求(PLC通信接口、网口、卡槽、USB口等);
5、配套编程控制软件。
工业控制计算机
1、Intel I5处理器;
2、8G或以上内存;
3、120G或以上固态硬盘;
4、21寸或以上液晶显示器;
5、专用工控机箱;
6、配套键盘、鼠标等外设。
应用开发案例
1、机器人基础知识及手动操作;
2、机器人的 I/O 介绍与配置;
3、机器人程序数据介绍与设定;
4、机器人程序编写;
5、机器人的总线通讯;
6、机器人3D曲面 TCP 练习;
7、机器人写字、绘图;
8、机器人搬运;
9、机器人的上下料(搬运);
10、机器人涂胶与装配;
11、气动执行部件的控制;
12、气动检测部件信号检测;
13、输送线的控制(步进电机控制);
14、机器视觉识别;
15、机器人视觉分拣;
16、机器人自动拧螺丝装配;
17、智能立体仓库(库位检测、管理);
18、机器人快换工具管理(工艺逻辑);
19、PLC编程与设计;
20、HMI编程与设计;
21、总线通讯实训;
22、自定义实验实训。
计算机视觉开源案例
1、视觉定位
1.1 原点视觉定位
1.2 装配视觉定位
2、视觉测量
2.1 距离与长度测量
2.2 角度测量
2.3 圆弧与正圆、椭圆测量
3、视觉识别
3.1 手机电池生产日期检测
3.2 车牌及号码检测
3.3 条码、二维码识别
3.4 物料形状、颜色识别
3.5 物料视觉识别与分拣
4、视觉检测
4.1 零件缺陷检测
4.2 产品质量检测
