



- 您当前的位置是:首页 >人工智能产品 > 人工智能开发与应用平台
- 人工智能开发与应用平台
-

-
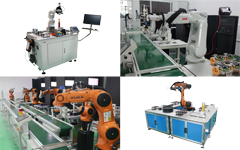
ROS工业级6轴机器人学习平台eAI4600
产品型号:eAI4600
ROS工业级6轴机器人学习平台是一款专门为机器人工程、人工智能等专业领域教学、科研等设计的机器人学习平台。
- 详细内容
-
产品介绍
ROS工业级6轴机器人学习平台是一款专门为机器人工程、人工智能等专业领域教学、科研等设计的机器人学习平台,该平台可用于学习6自由度机器人基本结构、运动控制、ROS系统及开发、Python编程、机器视觉、机器人相关应用等。
整个机械臂采用模块化组装工艺,学生可以学习机械结构设计、电机驱动、电子电路和机器人运动学、运动控制系统等各项专业知识。
硬件参数
机器人本体
最大负载:2kg
最大工作半径:540mm
轴数:6轴
重复精度:±0.06mm
轴运动范围:
(1)1轴:±170°
(2)2轴:±110°
(3)3轴:+40°至-220°
(4)4轴:±180°
(5)5轴:±120°
(6)6轴:±360°
机器人本体重量:28kg
机器人工作平台
1、整个平台采用立式结构,电气柜采用抽屉式结构,抽屉平台方便安装IO口扩展板、电磁阀、变频器、PLC等各种电气部件;下方方便放置机器人控制箱及工控机等。
2、工作平台为多用途可扩展设计方式,可以灵活安装各功能模块的导槽式铝型材结构,平台立柱可方便安装键盘、显示器支架。
3、尺寸:900mm×600mm×700mm。
4、材料:铝合金+装饰板。
机器人控制系统
控制器:ARM+FPGA控制器:ARM+FPGA
操作系统:开源ROS系统
编程语言:C++、Python
通讯接口:RS232、Ethernet、I/O
电源:单相 AC 200V-230V,50-60Hz
额定功率:0.8KVA
额定功率:2KVA
视觉系统
1、像素:130W像素
2、分辨率:1280×960
3、光谱:彩色
4、提供NI Vision 或OpenCV编写的案例程序,包括模板匹配、零件识别、字符识别、条码识别、二维码识别等。
分拣、搬运、装配系统
1、井式下料系统,步进电机控制。
2、自动传送系统,步进电机传送。
3、传送系统配备光电传感器,检测传送带上物料位置。
4、配合视觉系统定位物料准确位置,并进行自动分拣。
5、配合视觉,进行工件自动装配。
工业控制计算机1、Intel I5处理器
2、8G或以上内存
3、120G或以上固态硬盘
4、21寸或以上液晶显示器
5、专用工控机箱
6、配套键盘、鼠标等外设
气源气路
1、采用无油静音气泵
2、配有调压过滤器、气路等气动元件
3、排气压力:0.8Mpa
4、理论流量:220L/min
5、储气罐容量:50L
6、输入功率:600W×2
7、输入电压:AC220V/50Hz
8、噪音量:70dB
应用开发案例
1、ROS简介与ROS开发环境搭建;
2、ROS体系架构及主要环境——文件系统介绍;
3、ROS体系架构及主要环境——计算图介绍;
4、ROS体系架构及主要环境——通信机制介绍;
5、主题与服务介绍;
6、3D可视化工具介绍与使用;
7、ROS机器人的SSH 访问及基本配置;
8、ROS机器人vi的基本使用;
9、ROS系统6轴机器人模型创建;
10、ROS系统MoveIt!的使用;
11、ROS机器人基本移动控制;
12、ROS机器人OpenCV_Apps图形处理;
13、ROS机器人视觉颜色、形状识别;
14、ROS机器人视觉条码、二维码识别;
15、ROS机器人视觉文本、数字识别;
16、ROS机器人字母卡视觉分拣;
17、ROS机器人深度学习图片卡视觉分拣;
18、ROS机器人物料搬运;
19、ROS机器人物料视觉分拣;
20、ROS机器人工件自动装配。
- 上一篇:智能服务机器人eAI3100
- 下一篇:计算机视觉开发与实验平台RVP1200
